Warum schaltet die cfos-software den Control Pilot immer wieder auf state „Vehicle detected“?
| ♥ 0 |
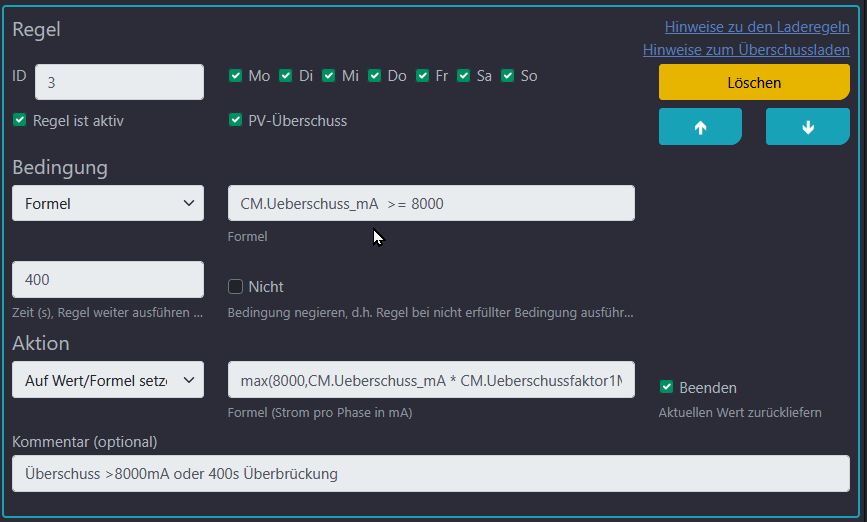
Ich verwende den Laderegelsatz im Anhang (json-Datei) und die cFos V.2.12.7. Die CM-Variablen haben folgende aktuelle Werte: CM.ZielsocHausM12 (Hausbatterie) 70% CM.ZielsocM12 (Fahrzeugbatterie) 85% CM.Ueberschussfaktor1M12 1 CM.Ueberschuss_mA ist mein Überschusswert in mA: CM.Ueberschuss_W ist mein speziell berechneter Überschusswert in W: Das Ziel ist Überschussladen, sobald die Hausbatterie einen vorgegebenen Füllstand CM.ZielsocHausM12 erreicht hat und solange die Fahrzeugbatterie einen vorgegebenen Füllstand CM.ZielsocM12 noch nicht erreicht hat. Wenn geladen wird und der Überschuss in mA unter 8000 sinkt, soll für 400s weiter geladen werden, bevor der Ladevorgang unterbrochen wird, in Regel 3, auch als Screenshot im Anhang. Im Logfile sieht man in den folgenden Zeilen, dass der Ladevorgang immer wieder unterbrochen wird: 855: 2026-03-11T09:41:15.467 I CP: PWM switch duty to 100.0 % Bei allen außer einer wird unmittelbar zuvor ein Wert errechnet, der oberhalb der Schwelle liegt, unter welcher der Ladevorgang unterbrochen werden soll. Es gibt keinen Grund, den Ladevorgang zu unterbrechen. Warum, liebe Mitarbeiter von cFos, macht die Wallbox das? Es ist nicht schön, zusehen zu müssen, dass hierdurch der Schütz im Fahrzeug andauernd grundlos an- und ausgeschaltet wird. Anhänge:
markiert als Spam
|